Lead
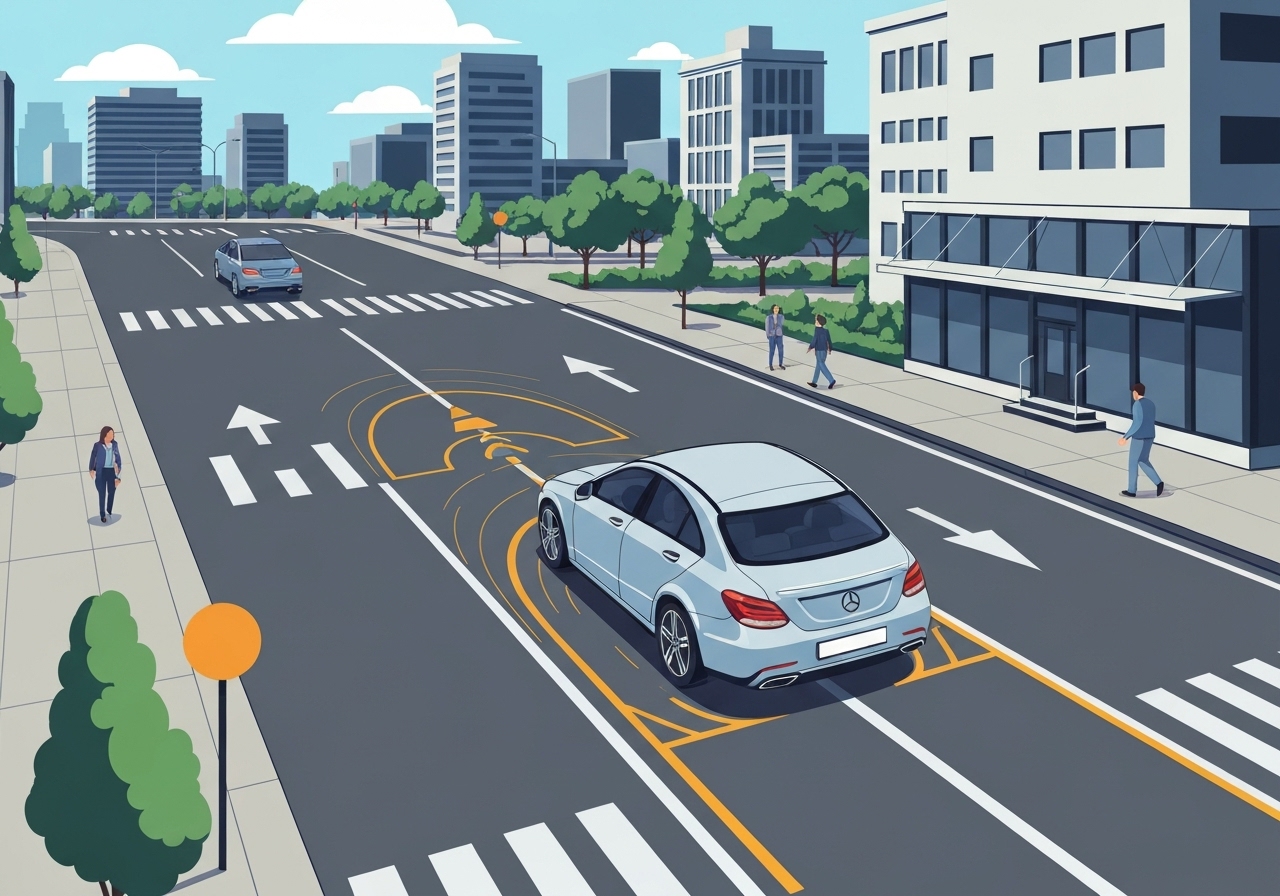
Mercedes-Benz demonstrated its new Drive Assist Pro system on a 20-minute urban run through the tech industry’s favorite city, during which an engineer in the driving seat did not need to intervene. The CLA handled stop signs, traffic lights and speed bumps, used light braking to shed a few miles per hour and then resumed its original speed, and navigated construction zones and double-parked vehicles. The car’s behavior reflects a collaborative model between driver and vehicle rather than full autonomy. The demo highlights the capabilities of a software-defined vehicle architecture powered in part by Nvidia’s Orin computer.
Key Takeaways
- The demonstration covered a 20-minute surface-street route; the engineer reported no interventions during that run.
- Drive Assist Pro reads stop signs and traffic lights and slows for speed bumps; it performs full stops at stop signs rather than “California stops.”
- Light braking is used to briefly reduce speed and then the system resumes the preset pace, similar to transient throttle inputs under cruise control.
- The CLA navigates construction zones and slows for double-parked cars without becoming confused in most tested scenarios.
- The vehicle is built as a software-defined vehicle with four central high-performance computers rather than many distributed electronic control units.
- Nvidia’s Orin chip is part of the compute stack responsible for perception and path planning in the system.
- Mercedes says the stack has moved from a rule-based approach to an end-to-end AI model, which it says improves tasks such as parking and lane changes.
Background
Automakers and tech suppliers have shifted toward software-defined vehicle (SDV) architectures to consolidate functions previously handled by many discrete electronic control units. Centralized compute enables more complex perception and planning algorithms, easier software updates, and a unified development approach across different vehicle domains. Mercedes has incorporated this trend into its latest CLA, combining multiple high-performance computers and third-party accelerators to handle sensor fusion and decision-making.
The industry debate has moved from purely rule-based systems toward machine-learning-driven stacks for on-road behavior. Rule-based approaches rely on hand-crafted logic for specific scenarios, whereas end-to-end AI models aim to generalize across more situations but introduce different validation and verification challenges. Regulators, safety researchers and consumers are watching closely as manufacturers deploy more advanced driver assistance features on public roads.
Main Event
The on-road demo emphasized a cooperative design: the system applies light braking to lower speed by a few miles per hour when appropriate, then returns to the previously set speed—mirroring how a human driver might briefly tap the accelerator during cruise control. The CLA’s Drive Assist Pro also plans lane choices ahead of time given a destination, enabling smoother lane changes and route-following across city streets.
During the run the car recognized and responded to traffic lights and stop signs; it brought the vehicle to full stops at stop signs, which can frustrate following drivers accustomed to rolling stops. The system also detected speed bumps and slowed accordingly, an uncommon capability for many driver-assist suites focused primarily on highways.
While the engineer did not need to intervene on the 20-minute circuit, Mercedes staff acknowledged some demos became confused by human crosswalk attendants carrying stop signs; those interactions remain an operational edge case. The CLA handled double-parked cars and simple construction-zone layouts without notable failure in the observed runs.
Analysis & Implications
The move to an SDV architecture with consolidated compute and machine-learning-driven stacks has clear technical benefits: it simplifies data flow between perception, planning and control, reduces hardware redundancy, and accelerates feature rollout through over-the-air updates. For consumers, those benefits can translate into steadily improving behavior after purchase, provided manufacturers maintain rigorous validation and update practices.
Safety regulators will likely scrutinize end-to-end AI models differently from deterministic rule-based systems. Machine-learning stacks can handle broader scenario variability but are harder to exhaustively test. That raises questions about certification, logging for incident review, and minimum driver engagement requirements for advanced driver assistance that still fall short of full autonomy.
Economically, reliance on standard high-performance accelerators such as Nvidia’s Orin aligns OEMs with a narrower set of compute suppliers, concentrating value in a few component vendors while potentially speeding development. Strategically, features that reliably read traffic lights, stop signs and speed-calming infrastructure improve the utility of driver aids in urban environments and could differentiate products in a market increasingly crowded with highway-focused systems.
Comparison & Data
| Item | CLA (Drive Assist Pro) |
|---|---|
| Demo length | 20-minute urban drive |
| Compute architecture | 4 central high-performance computers |
| Perception capabilities | Stop signs, traffic lights, speed bumps, lane planning |
| Stop-sign behavior | Full stop (not a rolling ‘California stop’) |
The table summarizes on-road observations from the demonstration. The 20-minute, engineer-supervised run shows practical urban capabilities distinct from highway-only driver assists, but it is a limited sample and not a broad safety validation.
Reactions & Quotes
“It is no longer on a rule-based stack,”
Magnus Östberg, Chief Software Officer, Mercedes-Benz (company statement)
Mercedes describes the new stack as an end-to-end AI model; the company says this enables faster, more natural behaviors such as parking and lane transitions compared with older rule-driven systems.
“I didn’t have to intervene once during the 20-minute drive,”
Engineer in driving seat (demonstration report)
The demonstration engineer’s experience suggests the system handled a range of common urban driving tasks during the single observed run, though company staff noted some demos were confused by human crosswalk attendants.
Unconfirmed
- Frequency of failures: beyond the reported demo runs, the overall rate at which Drive Assist Pro fails or requires human intervention in diverse urban scenarios is not disclosed.
- Crosswalk attendant interactions: reports that some demos were confused by human attendants are anecdotal and lack a quantified failure rate.
- Regulatory approval timeline: no official schedule has been published for expanded functionality or changes to driver engagement requirements.
Bottom Line
Mercedes’ Drive Assist Pro, demonstrated on a 20-minute urban route in the CLA, shows notable progress in applying ML-driven capabilities to surface streets: reading stop signs and lights, slowing for speed bumps, and planning lane choices ahead of time. The vehicle’s cooperative approach—using light braking to adjust pace and resuming to a preset speed—keeps the driver engaged while automating many routine tasks.
That progress arrives as the industry shifts to software-defined vehicles and consolidated compute platforms such as Nvidia’s Orin. The technology improves urban usability of driver aids, but broader safety validation, regulatory clarity and measured deployment will determine how quickly such features become standard and how much autonomy they effectively deliver in everyday driving.
Sources
- Ars Technica — news article reporting the on-road demonstration and interviews (journalism)
- Mercedes-Benz — corporate site and official statements (official/company)
- Nvidia DRIVE / Orin — product and platform information for automotive compute (vendor/technical)